бражения из точки А в точку В фокальной плоскости обозначим через а и определим его значение из треугольника АОВ, где угол при вершине О есть о.
Точка О находится в оптическом центре объектива; расстояние АО равно фокусному расстоянию объектива /.
Мы имеем
так как угол 8 мал. Это смещение, по свойству преломления света в призме, происходит в направлении, противоположном ребру клина.
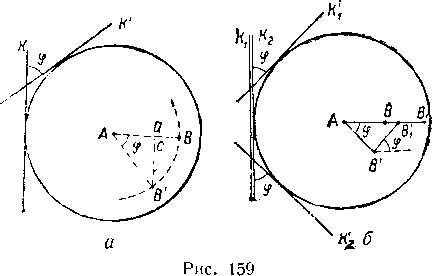
Рассмотрим теперь, что будет происходить с изображением В при вращении клина К вокруг оптической оси ОА. Обратимся к рис. 159,а. Здесь плоскость рисунка есть фокальная плоскость F (рис. 158). Точка А — проекция оптической оси, перпендикулярной плоскости рисунка. Прямая линия К с левой стороны рисунка обозначает положение ребра клина. При таком положении клина точка А передвинется на величину АВ = а в точку В. Повернем клин на некоторый угол ср в положение Kv В своем новом положении клин переведет изображение из точки А в точку В' в направлении, перпендикулярном своему ребру, на то же расстояние а. Легко видеть, что при вращении клина вокруг оптической оси точка В будет перемещаться по окружности ВВрадиус которой равен а.
В поле зрения дальномера при вращении такого клина наблюдатель будет видеть перемещение изображения по окружности, т. е. перемещение будет иметь слагающие в вертикальном и горизонтальном направлениях.
В системе дальномера нам необходимо иметь смещение изображения только в горизонтальном направлении, и поэтому из описанного действия клина нам необходимо исключить вертикальную составляющую перемещения.
Из рис. 159,а легко видеть, что горизонтальное перемещение изображения будет представляться отрезком АС и будет равно АС = а • cos <?.
Равным образом вертикальное перемещение определится из равенства В С = — а • sin ©.
Представим себе, что у нас стоит еще второй клин с таким же преломляющим углом; он также вызывает смещение изображения на величину а. Допустим, что первоначально ребра обоих клиньев совпадают в положении КгК2 (рис. 159,6).
* В этом случае изображение А будет переведено в точку Вг на расстояние 2а, вдвое большее, чем при действии одного клина.
Пусть теперь клин Кг повернут на угол 9, по часовой стрелке, в положение К1У а клин К2 на угол — <?, против часовой стрелки, в положение К'2. Тогда от действия клина КУ изображение перейдет из точки А в точку В'. Второй клин К'2 переведет новое изображение из точки В' в В\.
Определим положение точки В/.
Горизонтальное перемещение АВ± будет составляться из двух отдельных горизонтальных перемещений, производимых каждым клином, т. е.
 )
)Вертикальное перемещение будет составляться также из двух вертикальных перемещений, направления которых прямо противоположны, и легко видеть, что оно будет равно нулю, так как a sin a sin (—©) = 0.
Таким образом, если оба клина и К2 совершенно одинаковы, вертикальнее перемещения изображения уничтожаются, и мы имеем возможность полу-